Das in unserem letzten Artikel erwähnte Rätsel des 17. Oktober hat sich mittlerweile gelüftet und es war, wie von uns bereits erwartet, die Vorstellung des Autopiloten der nächsten Generation.
Da mit dem Begriff eines Autopiloten bei Kraftfahrzeugen nicht jeder im Detail etwas anfangen kann, möchte ich im Rahmen dieses Artikels etwas weiter ausholen und zusammenfassen, was man über den aktuellen Stand der Technik beim autonomen Fahren wissen sollte und welche Fragen und Probleme das Thema jetzt und in Zukunft aufwirft.
Ich brauch‘ Verstärkung, K.I.T.T.
Die meisten Kinder der 80er Jahre werden sich, nicht selten mit einem breiten Grinsen, an das sprechende Auto „K.I.T.T.“ zurück erinnern, das – mit einer eigenen Identität versehen – in der Fernsehserie „Knight Rider“ in der Lage war selbstständig Entscheidungen zu treffen und, im Rahmen seiner Möglichkeiten als Fahrzeug, auch autonom zu agieren. Für die folgenden Jahrzehnte waren sowohl die durch eine künstliche Intelligenz initiierte Sprachsynthese, als auch das vollständig autonome Fahren technisch unvorstellbar und lagen noch weit entfernt im Reich der Hollywood-Regisseure. Mittlerweile sind wir an einem Punkt angelangt, an dem diese Themen greifbar nah erscheinen. Und der Fortschritt der Entwicklung in diese Richtung, der beschleunigt sich durch massive Forschungsaktivitäten zunehmend.

Autonomes Fahren klar definiert
Aber was versteht man überhaupt unter einem Autopiloten in Kraftfahrzeugen und dem autonomen Fahren?
Die Klassifizierung der Stufen für autonomes Fahren laut der Norm „SAE J3016“, die auch von der Bundesanstalt für Straßenwesen und anderen Stellen übernommen wurde, sieht die Einteilung autonom agierender Fahrzeuge nach folgenden Stufen (engl. Level) vor:
- Stufe 0 (keine Automation): Der Fahrer fährt eigenständig
- Stufe 1 (Assistenzsysteme): Die Längs- oder Querführung wird automatisiert (z.B. Abstandstempomat)
- Stufe 2 (Teilautomatisierung): Ein oder mehrere Systeme helfen sowohl bei der Längs- und Querführung, der Fahrer bleibt ständig reaktionsbereit
- Stufe 3 (Bedingte Automatisierung): Autonomes Fahren, in bestimmten Umgebungen (z.B. Autobahn) auch nutzbar ohne Überwachung der Umgebung durch den Fahrer
- Stufe 4 (Hochautomatisierung): Vollständig autonomes Fahren, der Fahrer muss nur noch unter bestimmten Bedingungen (z.B. Schlechtwetter) übernehmen
- Stufe 5 (Vollautomatisierung): Vollständig autonomes Fahren ohne Einschränkungen, keine Überwachung der Umgebung durch den Fahrer notwendig
Der aktuell in den Fahrzeugen von Tesla befindliche Autopilot befindet sich auf einem Entwicklungsstand zwischen den Stufen 2 und 3. Die meisten Assistenzsysteme der Konkurrenz, die in der Regel eigenständige Bezeichnungen für ihre Technologie nutzen, sind aktuell auf Stufe 2 angesiedelt. Das Autopilot-System im Tesla beschleunigt, lenkt und bremst das Fahrzeug selbstständig. In bestimmten Umgebungen, wie z.B. der Autobahn, kann der Autopilot zwar über lange Distanzen autonom fahren, aber im Gegensatz zur Stufe 3 muss der Fahrer dabei stets aufmerksam bleiben und im Notfall sofort übernehmen können.
Was bietet Tesla beim Autopilot?
Da der bisherige Autopilot vor allem in Bezug auf die Sensoren und Rechenleistung technisch limitiert ist und das Erreichen einer höheren Stufe des autonomen Fahrens damit kompliziert bis unmöglich ist, hat Tesla nun aufgerüstet und bietet für den neuen Autopilot 2.0 das folgende – als Option erhältliche – Paket an:
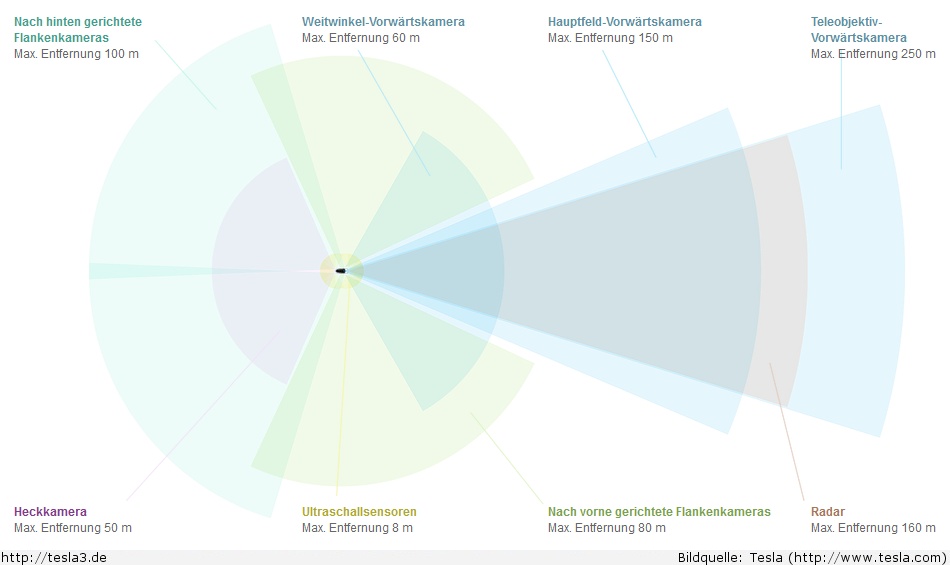
- acht Kameras, zur Erfassung der Fahrzeugumgebung
- zwölf Ultraschallsensoren zur Identifikation von Objekten
- Vorderes Radar, um bei schlechtem Wetter oder vorausfahrenden Fahrzeugen bessere Umgebungsdaten zu erfassen
- neuer Bordcomputer zur Auswertung der Daten mit der 40-fachen Rechenleistung des Vorgängers

Tesla strebt mit dem „Autopiloten 2.0“, dessen Rechen-Hardware und Sensoren ab sofort in die Neuwagen der Marke verbaut werden, eine Weiterentwicklung der Software bis zur Stufe 5 an, also bis zur Vollautomatisierung ohne Überwachung durch den Fahrer. Bis Dezember 2016 läuft noch eine Testphase zur Sammlung von Datenmaterial und bis dahin ist die neue Software für den Endkunden noch nicht nutzbar.
Ab kommendem Jahr werden Schritt für Schritt neue Funktionen freigeschaltet, die Stufe 5 und damit das vollautomatisierte Fahren soll innerhalb der nächsten beiden Jahre erreicht werden. Das ist ein sehr ambitioniertes Ziel und aktuell kann noch niemand vorhersehen wie gut das Unterfangen letztendlich gelingen wird. Mit dem Einbau der Hardware in die aktuellen Fahrzeuge ist jedenfalls bereits der erste Schritt getan und den Ankündigungen folgen immerhin auch Taten.
Funktionsweise des Autopiloten
Die Rechen-Hardware und Sensoren sind bei modernen Fahrzeugen wie dem Tesla Model S und X bereits in der Serie erhältlich, für das Model 3 ist eine technisch gleichwertige Ausstattung geplant. Aber was momentan noch allen Herstellern vergleichbarer Systeme fehlt, das ist die notwendige Software für ein vollautomatisiertes Fahren.
Woran liegt das?
Während bei Sensoren wie einem Radar oder Lidar (Laser detection and ranging) im Rahmen der jeweiligen Genauigkeit noch einigermaßen klar unterschieden werden kann welche Art von Objekt sich mit welcher Geschwindigkeit im Erfassungsbereich des Sensors bewegt, ist die Auswertung von Kamera-Bildern eine ganz andere Art der Herausforderung. Hier kommt das sogenannte DNN (deep neural network) ins Spiel. Das DNN basiert auf der bereits seit Jahrzehnten bekannten Technik künstlicher neuronaler Netze, die grob ein dichtes Netz aus einfachen Nervenzellen simulieren und somit der Struktur des menschlichen Gehirns ähneln. Die neuronalen Netze werden in verschiedene Ebenen aufgeteilt, die zunehmend komplexere Merkmale verwenden um eine Information zu kategorisieren. Durch die heute verfügbaren Datenmengen und Rechenleistungen ist es nun möglich, dass künstliche neuronale Netze bereits in diesem frühen Entwicklungsstadium durch Lernen präzisere Ergebnisse liefern als bisherige, regelbasierte Systeme.
Zudem existieren mit den Grafikchips der neuesten Generation auch kompakte, preiswerte und damit in Fahrzeugen nutzbare Systeme zur Simulation großer neuronaler Netze, was auch erklärt warum die für Spiele-Grafikkarten bekannte Firma nVidia in diesem Geschäft besonders aktiv ist.
Die meisten Auto-Hersteller setzen bei ihrer Autopilot-Software auf hybride Systeme, d.h. es werden neben Technik aus dem Bereich der neuronalen Netze auch vorprogrammierte Regeln und andere Methoden des Maschinenlernens genutzt. Neben Tesla ist meiner Meinung nach ganz besonders Google mit dem „Self-Driving Car Project“ in diesem Bereich sehr ambitioniert unterwegs und auf einem guten Weg der Technologie zum Durchbruch zu verhelfen.
Welcher Ansatz sich langfristig und bei Vorhandensein großer Datenmengen letztendlich durchsetzen wird, das vermag niemand heute sicher vorherzusagen.
Rechtliche Situation
Neben technischen Herausforderungen kann auch die regulatorische Seite die Einführung einer Software zum automatisierten Fahren stark verzögern. Die Stufen 3 bis 5 (Bedingte Automatisierung sowie Hoch- und Vollautomatisierung), bei denen mindestens in bestimmtem Umgebungen das Fahrzeug vollautonom handelt, sind aktuell rechtlich noch gar nicht soweit geklärt, dass diese in Europa einsetzbar wären.
So ist derzeit unklar, wie man mit der Schuldfrage bei Unfällen umgeht. Denn bei Systemen, die vom Fahrer überwacht und übersteuert werden, liegt momentan die Haftung ganz klar bei diesem. Wenn allerdings ein Fehler in der Software eines vollautonomen Fahrzeuges für einen Unfall verantwortlich ist, dann wird sich auch der Hersteller der Haftung nicht entziehen können.
Grundlage für die bisherige Rechtssprechung ist das sogenannte „Wiener Übereinkommen für den Straßenverkehr“, das die Basis für die meisten Verkehrsregelungen ist und weltweit von 74 Ländern ratifiziert wurde. Dort wurde im Jahr 2014 auch das Thema der Assistenzsysteme aufgenommen, wobei der Fahrer weiter die Verantwortung trägt und das System ständig überwachen sowie ggf. übersteuern können muss. Das Wiener Übereinkommen verpflichtet die Staaten bei der Ausgestaltung ihrer innerstaatlichen Verkehrsregeln bestimmte Vorgaben zu beachten, deshalb kann auch die deutsche Straßenverkehrsordnung nicht ohne weiteres eine Art der Automatisierung zulassen, die den Fahrer von seinen bisherigen Pflichten entbindet.
Wie geht es in dieser Sache nun weiter?
Zur Formulierung und Lösung der rechtlichen Probleme wurde vom Bundesministerium für Verkehr und digitale Infrastruktur (BMVI) ein „Runder Tisch“ zum Thema des automatisierten Fahrens eingerichtet. Ob das ausreicht um die offenen Fragen zu beantworten und einen rechtlichen Rahmen zu definieren, das wird man – auch angesichts des rasanten technischen Fortschritts – bald klären müssen.
Ethische und moralische Überlegungen
Selbst wenn die rechtlichen Fragen rund um das vollautomatisierte Auto geklärt sind, bleiben ethische und moralische Fragestellungen in Zusammenhang mit Unfällen. So wird gerne die, in der Realität wohl äußerst selten anzutreffende, Situation konstruiert, dass sich der Autopilot eines Fahrzeugs entscheiden muss, ob er im Falle einer unvermeidbaren Kollision nun lieber einen Rentner oder eine Gruppe von Kindern überfährt.
Wenn autonome Systeme selbstständig Entscheidungen treffen, die moralische Implikationen haben, braucht man eine Maschinenethik.
Oliver Bendel, schweizer Philosoph und Informatiker
Bis man für solche Situationen eine Maschinenethik definieren muss ist es allerdings noch ein weiter Weg, denn momentan sind weder Mensch noch Maschine in der Lage eine derartige Situation so präzise einzuschätzen, dass der Ausgang der einen oder anderen Entscheidung schon vorab sicher feststeht. Man wird also noch etwas Zeit haben diese Fragen zu stellen und hoffentlich auch eine befriedigende Antwort darauf zu finden.
Totale Überwachung und Datenschutz
In der faszinierenden Welt der selbstfahrenden Fahrzeuge stellt das Thema des Datenschutz einen Faktor dar, der nicht unterschätzt werden sollte. Über das Thema hatte ich bereits Ende Mai diesen Jahres einen Artikel geschrieben, der die Vereinbarkeit der Sammelwut der Autohersteller mit dem Grundrecht der informationellen Selbstbestimmung hinterfragt.
Laut einer Studie des Beratungsunternehmens Arthur D. Little zu diesem Thema haben über zwei Drittel der Befragten massive Bedenken, was die Sicherheit ihrer privaten Daten angeht. Es wird daher entscheidend für den Erfolg der Autopilot-Technologie, dass die Hersteller bezüglich der Nutzung der erhobenen Daten einerseits auf Transparenz setzen und andererseits jedem die Möglichkeit geben selbst zu entscheiden, mit welchen Daten er sich an der Weiterentwicklung der Technologie beteiligen möchte.
Chancen und Risiken
Abschließend ist anzuerkennen, dass Tesla – trotz der auszurichtenden Gebühr für die Aktivierung der Funktion – mit dem Einbau einer so aufwändigen Autopilot-Hardware erst mal in Vorleistung geht, vermutlich weil man darauf spekuliert, dass der Wert der gesammelten Daten diese Anfangsinvestition eines Tages mehr als wieder wett macht.
Die Möglichkeiten, die ein vollautomatisiertes Fahrzeug bietet, sind größer und vielfältiger als man sich auf den ersten Blick vorzustellen vermag:
Einerseits können dann auch Menschen von der Flexibilität des Autos Gebrauch machen, die keinen oder noch keinen Führerschein besitzen, andererseits kann man sein Fahrzeug den anderen Stadtbewohnern zur Verfügung stellen, während man es nicht nutzt. Auf Zuruf, im wahrsten Sinne des Wortes, fährt es dann wieder nach Hause und kann einen abholen. Die Möglichkeiten sind vielfältig. Aber den aus heutiger Sicht wirtschaftlich lukrativsten Teil, den wird Tesla über das sog. „Tesla Netzwerk“ organisieren, über das allerdings noch zu wenig Details bekannt sind, als dass es sich lohnt schon näher darauf einzugehen. Sicher ist nur, dass man damit den Mobilitätskonzepten der Firma Uber Konkurrenz machen wird.
Wenn man es schafft eine breite Akzeptanz für diese Technologie zu schaffen, wenn sie einem wirklich mehr Sicherheit und Flexibilität bringt, man aber gleichzeitig weiterhin ohne nennenswerte Einschränkungen selbst fahren kann, dann hat vielleicht in wenigen Jahren fast jeder Autofahrer seinen K.I.T.T. zu Hause in der Garage oder im Fahrzeug-Pool seines Mobilitätsanbieters stehen.